E-Mobility Driving Platform
E-Mobility Driving Platform
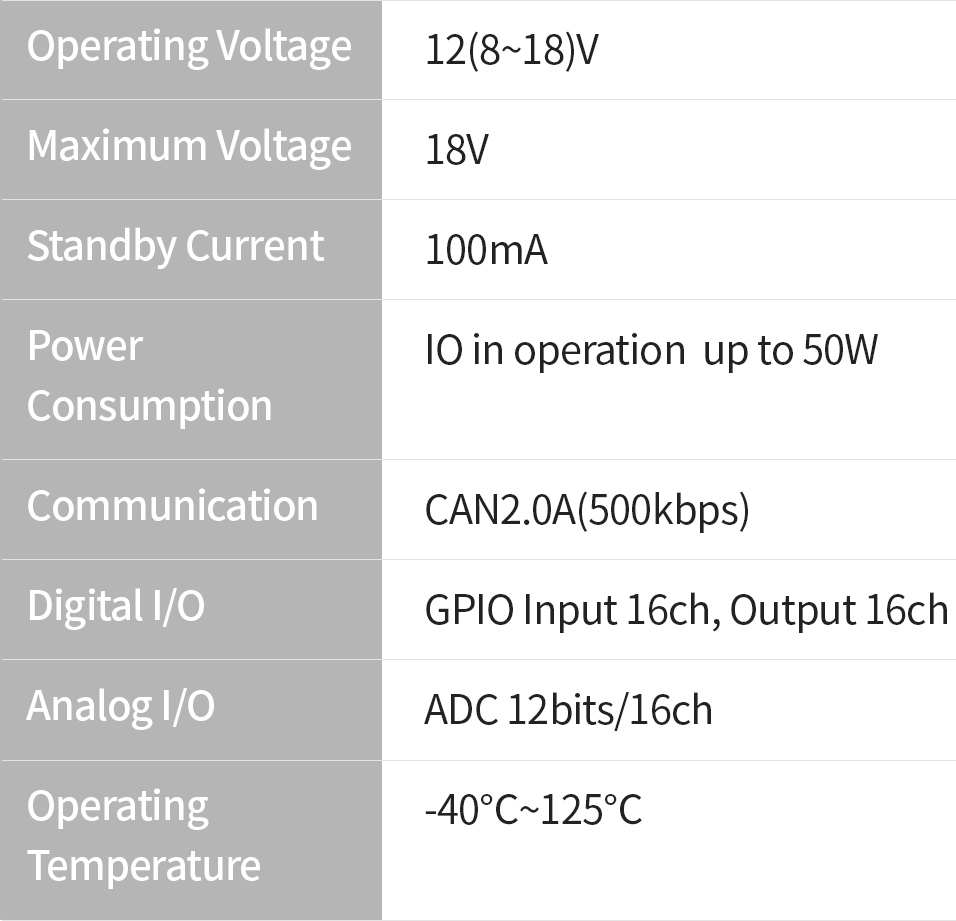
Vehicle Control Unit(VCU)
E-Mobility Driving Platform
- Vehicle Control Unit(VCU)
-
- - Vehicle system control based on CAN communication among
cluster, MCU and BMS
- Various sensor inputs receiving and actuator acting
- Regenerative braking, charging cooperation control
- IMU(Inertial Measurement Unit) equipped for measuring
vehicle driving status
- Self-diagnosis function(overvoltage, overcurrent, short circuit, etc)